
 产品:57
产品:57
 联系我们
联系我们

爱普生机器人无驱动电源时的紧急移动
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
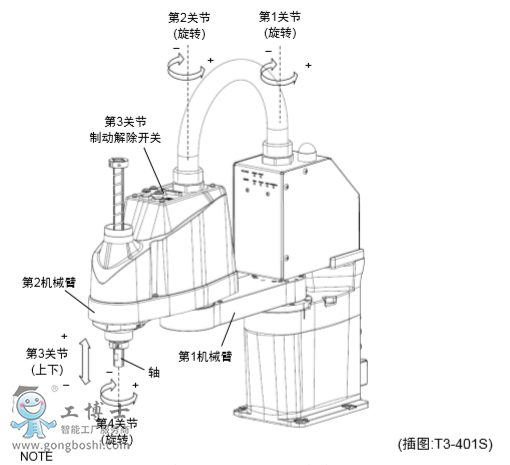
当系统处于紧急模式时,根据如下所述用手按下爱普生机器人的机械臂或关节:
第1机械臂 用手按下机械臂。
第2机械臂 用手按下机械臂。
第3关节 施加到关节的电磁制动器被解除前,无法用手上/下移动关节。 需在按下制动解除开关时向上/向下移动关节。

第4关节 用手旋转轴。
制动解除开关仅作用于第3关节。在紧急模式下按下制动解除开关时,第3关节制动 器被解除。 按下制动解除开关期间,请注意因夹具末端自重而产生的下垂。
发生下列错误时,即使按下制动解除开关,爱普生机器人的制动也不会解除。 检查电缆连接并消除错误原因。
然后,再次通电并解除制动。 错误: 1552, 2118, 4003, 4004, 4009, 4100, 4101, 4103, 4187, 4188, 4189, 4191, 4192, 4233, 4240, 4285-4292, 9633, 9640, 9691, 9685-9692
了解更多机器人资讯点击:爱普生机器人