
 产品:57
产品:57
 联系我们
联系我们

工具坐标系是相对于机械坐标系而言的。机器人每个轴的位置相当于机械坐标系。而工具坐标系是用于机器人末端的机械手的,比方说你这个机械手要在某个工作台进行动作,那么只要确认了这个工具坐标系,就不用管机械坐标系。
本文主要针对爱普生机器人4轴机器人如何建立工具坐标系及其验证进行详细阐述。
1、建立与机器人之间的通信:通过EPSON RC+软件,点击设置>>电脑与控制器通信,实现PC与机器人之间的通信,这里可以采用USB或者以太网通信。

2、打开工具向导:通过EPSON RC+软件,点击工具>>爱普生机器人管理器>>工具>>工具向导,打开工具向导。

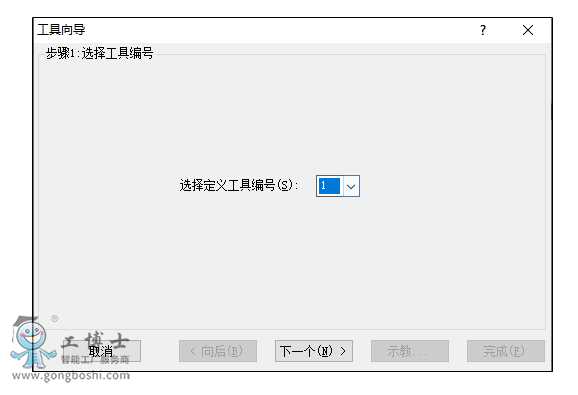
3、选择工具编号:这里可以选择一个需要创建的工具编号,本例为工具1。
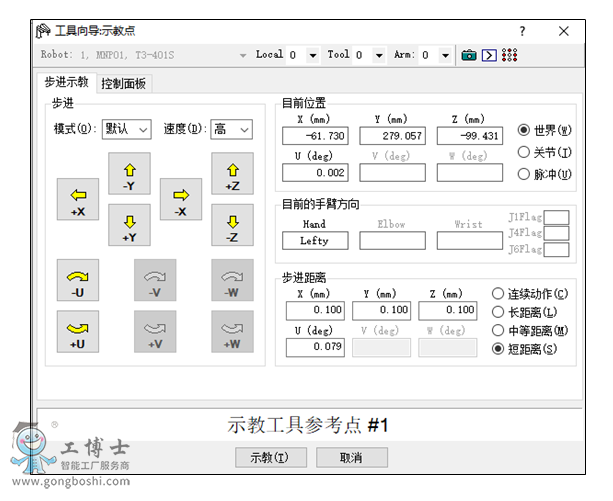
4、示教***个参考点:直接点击示教即可。

5、工具向导,示教参考点1:在步进示教界面,控制U轴为0°,接着再控制XY,将工具的中心对准特征点,完成后点击示教按钮。
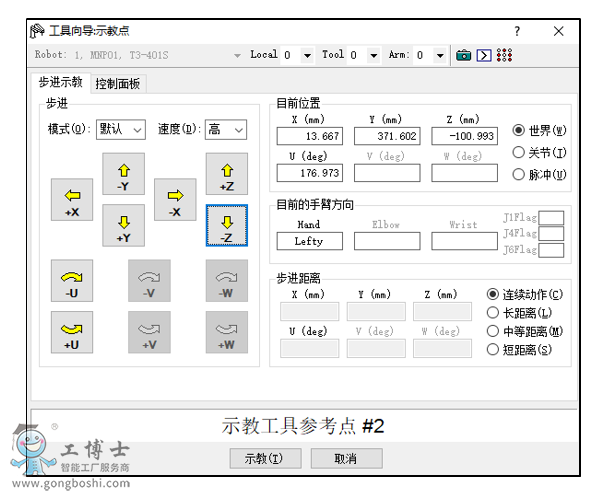
6、示教第二个参考点:直接点击示教即可。

7、工具向导,示教参考点2:在步进示教界面,控制U轴为180°,如果由于机械原因,旋转不了180°也没关系,接着再控制XY,将工具的中心对准特征点,完成后点击示教按钮。
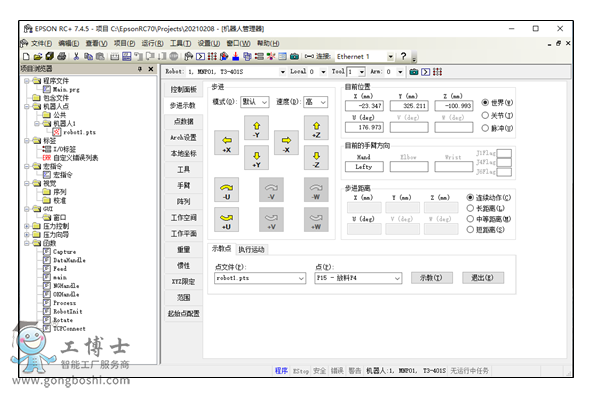
8、示教完成。

9、工具示教完成后,需要进行验证,在步进示教界面,切换Tool为刚刚示教的工具1,然后旋转U轴,观察工具的中心是否始终对准特征点,如果始终对准,说明该工具可用,如果存在偏移,说明需要重新创建工具。
注:本文章文字、图片部分来自网络
版权归原作者,侵删
工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种品牌机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
了解更多爱普生机器人咨询可咨询:爱普生机器人服务商