产品:57
产品:57
 联系我们
联系我们

目前在医疗、食品等行业,还存在大量人工进行高重复性或者高强度的搬运作业。随之带来的问题就是人工成本高,效率低。
鉴于此推荐使用爱普生机器人搭配飞拍和传送带跟踪功能提高取放料效率。既解决了人工成本高、效率低的问题。而且,与传统的传送带物料静态抓取相比,该方案传送带与机器人均无需暂停拍照暂停取料,如此显著提高了抓取效率与传送效率,飞拍也保证了物料的取放精度。
下面,我们通过视频截图来了解飞拍+传送带跟踪的具体应用:


爱普生机器人飞拍+传送带跟踪解决方案
机器人搭配飞拍+传送带跟踪,实现对物料的快速跟踪拾取分类,同时保证定位精度。目前熟知的传送带静态取放料方式存在诸多瓶颈和短板:抓取时传送带需暂停、拍照定位需暂停、CT较长、效率难以进一步提高。而飞拍+传送带跟踪可以提高搬运效率和精度,切实为客户提升生产效率。
该方案具有如下优势
1.传送带无需暂停,机器人连续拾取物料,相比静态抓取,提高抓取效率。
2.视觉应用,进一步提升精度,定位精度可达±0.1mm
3.飞拍定位,相比静态视觉定位,机器人无需暂停拍照,提高效率15%
4.机器人、视觉及其他软件功能,爱普生提供一站式服务
方案构成
爱普生SCARA LS6+爱普生视觉系统PV1+传送带跟踪+飞拍
传送带跟踪 通过视觉系统/传感器识别传送带来料工件,机器人末端对工件进行动态跟踪、抓取/放置,传送带无需暂停,实现了高效率的自动拾取-放置操作。配合视觉系统,也可识别更多工件种类,且分别定位不同工件角度和位置。在不考虑连续/间歇传送带操作的情况下,协助保持生产率。
湿巾产线传送带跟踪应用
飞拍,即飞行抓拍 此功能非常适合把凌乱工件高速整理的应用案例。工件从抓取到拍照、放料(或组装),一连串的动作可在不停止机器人的情况下连续执行。飞拍和传送带跟踪功能的有机结合,提升效率同时保证精度。
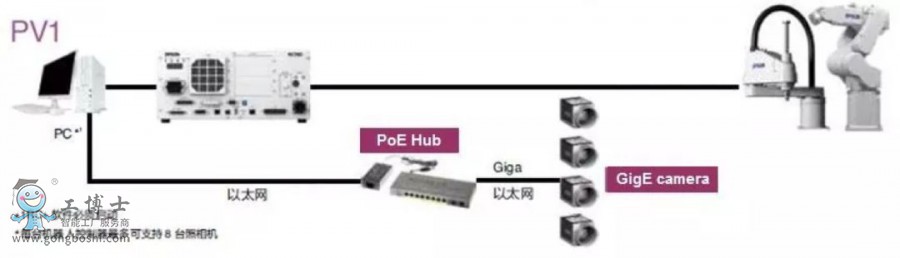
爱普生视觉系统PV1 补偿来料的位置偏差,实现对产品的高精度取放。爱普生视觉软件嵌入RC+软件内,调取使用方便,简单易用,快速上手;无需通讯程序;向导指示,自动校准。
PV1视觉系统构成
爱普生机器人SCARA机器人LS6 高性能、高性价比;高速循环时间使零部件吞吐量得到提升;适用于多夹具,多工件搬运;出色的加/减速率,平稳的启动/停止;强大的专用伺服系统设计,残余振动低。