
 产品:57
产品:57
 联系我们
联系我们


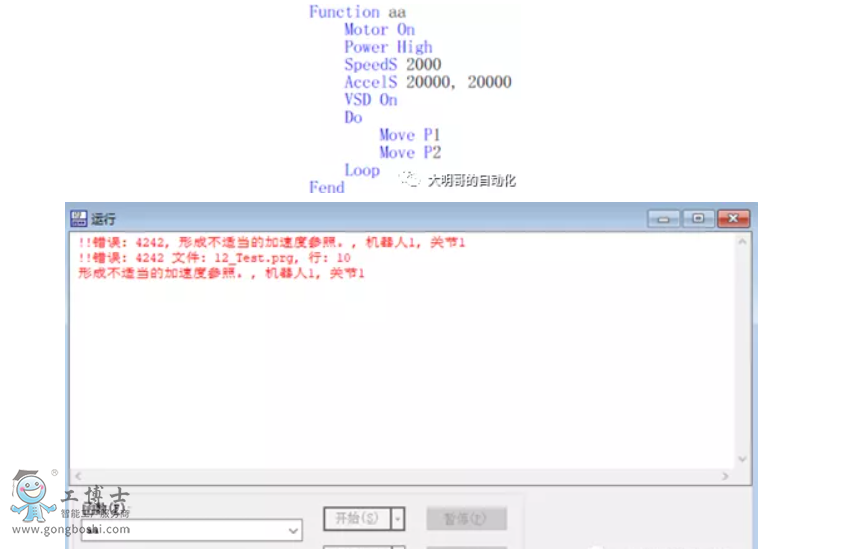
当机器人执行CP动作时,如果关节的变化速度过快超过了限制范围,就会报警“4242 形成不适当的加速度参照”。此时,可通过指令设置变速CP动作,以防止加速度错误和超速错误的发生。
在保持动作轨迹的状态下自动限制关节速度以执行动作的功能。关节速度受限时,不保持通过SpeedS设置的工具中心点速度,但关节速度低于限制范围时,将恢复为原来的工具中心点速度。
变更了VSD 的设置值,将保持有效至下一次控制器启动时。控制器启动时,VSD 将切换为OFF 状态。
2、指令说明
2.1、VSD
用于设置SCARA机器人使用指令Move、Arc、Arc3等的变速CP动作功能。如果使用VSD,仍发生加速度错误和超速错误,请将AccelS、DecelS、SpeedS调小。
格式:
VSD 参数
参数 On/Off
On:将SCARA机器人的变速CP动作功能设为有效。
Off:将SCARA机器人的变速CP动作功能设为无效。
2.2、AvoidSingularity
用于设置奇点通过及变速CP 动作功能。
奇点通过功能,用于6轴机器人与RS系列机器人在执行CP动作过程中靠近奇点时,为避免出现加速度错误,而保持原速度通过不同于原有轨迹的轨迹,并且可以在脱离奇点后返回正常的轨迹。控制器启动时,奇点通过功能默认有效。
变速CP动作功能,用于6轴机器人与RS系列机器人在执行CP动作过程中接近奇点时,为避免出现加速度错误或超速错误,在保持相同轨迹的同时自动控制速度。并且可以在脱离奇点后恢复为正常的速度指令。
格式:
AvoidSingularity Mode
Mode 表示特殊点通过模式的整数表达式

3、参考程序
注:本文章文字、图片部分来自网络
版权归原作者,侵删
工博士可以提供ABB,库卡,安川,发那科和欧地希等各种一线进口机器人,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理***于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
了解更多爱普生机器人咨询可咨询:爱普生机器人服务商